English
English


Robot specifications
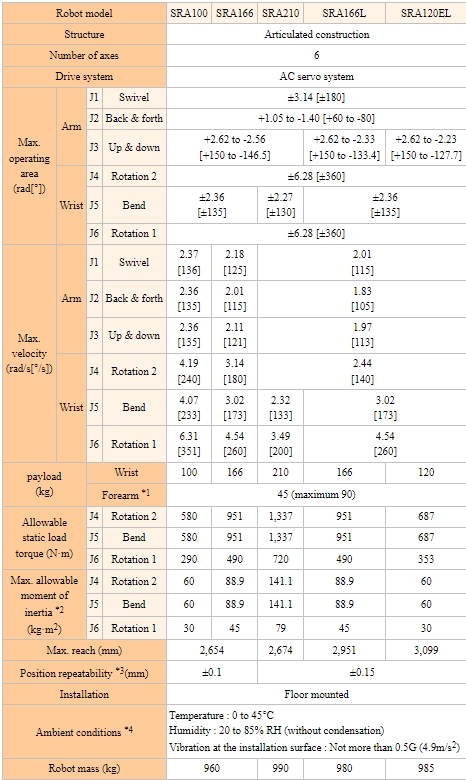
1[rad]=180/π[°] 1[N·m]=1/9.8[kgf·m]
(*1) Load specification of number 1 arm varies according to wrist load conditions and installation position.
(*2) Note that the allowable moment of inertia of wrist varies with the wrist load conditions.
(*3) JIS B 8432 compliant.
(*4) Permitted height is not higher than 1,000m above sea level. If used in higher place, permitted temperature is affected by height.
Exterior dimensions and operating envelope
SRA100/166/166L/120EL