
 English
English


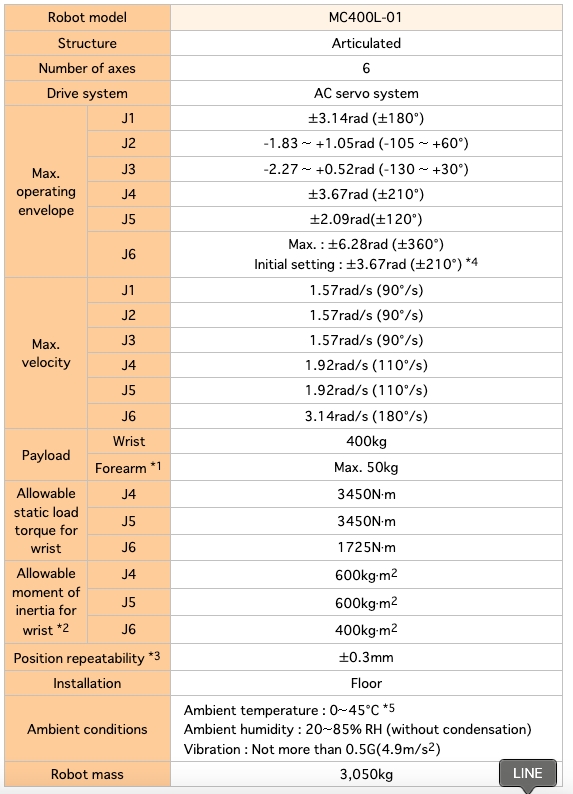
1[rad] = 180/π[°], 1[N·m] = 1/9.8[kgf·m]
(*1) This value changes by placement and load conditions of a wrist.
(*2) The Allowable moment of inertia of a wrist changes with load conditions of a wrist.
(*3) This value conforms to “JIS B 8432”.
(*4) The initial setting of the software limit is ±210°. When installing the cables in the hollow hole part of J6, please use the robot in the range of ±210°.
If the cables do not go through the hollow hole of J6, it is possible to widen the operating envelope of J6 up to ±360° considering the condition.
If the cables do not go through the hollow hole of J6, it is possible to widen the operating envelope of J6 up to ±360° considering the condition.
(*5) Permitted height is not higher than 1,000m above sea level. If used in higher place, permitted temperature is affected by height.
Exterior dimensions and operating envelope
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Act. Please go through careful investigation and necessary formalities for export.



