ไทย
ไทย


Robot specifications
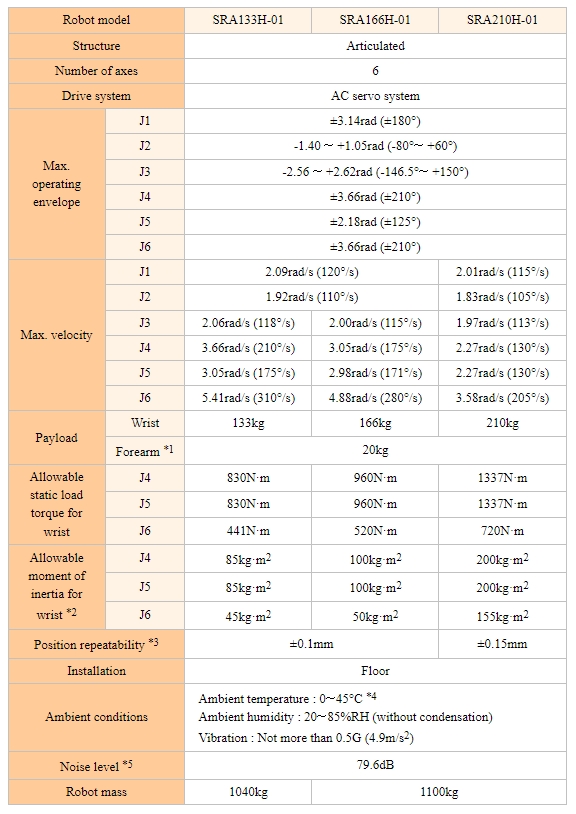
1[rad]=180/π[°], 1[N·m]=1/9.8[kgf·m]
(*1) This value changes by placement and load conditions of a wrist.
(*2) The Allowable moment of inertia of a wrist changes with load conditions of a wrist.
(*3) This value conforms to “JIS B 8432”.
(*4) Permitted height is not higher than 1,000m above sea level. If used in higher place, permitted temperature is affected by height.
(*5) A-weighted equivalent sound level measured according to JIS Z 8737-1 (ISO 11201). (while operating at maximum speed with rated load)
Exterior dimensions and working envelope