English
English


Basic Specification of Robot
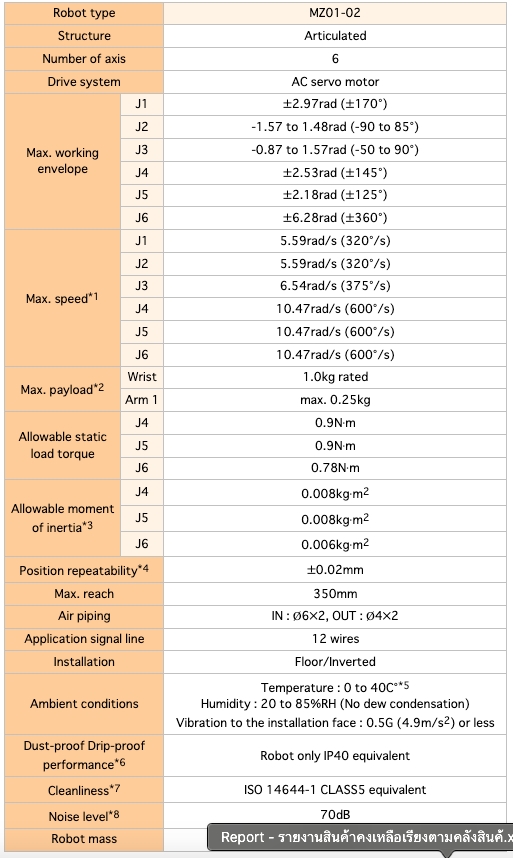
1[rad]=180/π[°] 1[N·m]=1/9.8[kgf·m]
* Explosion-proof version is not available.
*1 The “Max. speed” in this table is the available maximum value and will change depending on the work-program and the wrist load condition.
*2 When no load is on arm 1 (arm of axis 3), the max. wrist load is 1.0kg. However, when a 0.25kg load is on arm 1, the wrist load can only go up to 0.75kg.
*3 The allowable moment of inertia of wrist changes with load conditions.
*4 Based on JIS B8432
*5 Permitted installation is less than 1,000m above sea level.
Allowable operating temperature dependent on installation height.
Allowable operating temperature dependent on installation height.
*6 Limit use in applications where liquids, such as, organic compound, acidity, alkalinity, chlorine, gasoline and/or cutting fluids. These could deteriorate seal material.
Wire harness is IP65 equivalent, controller is IP20 equivalent.
Wire harness is IP65 equivalent, controller is IP20 equivalent.
*7 To ensure a cleanliness, install the robot in a down-flow type cleanroom.
The robot’s packaging is not dust proof. Before bringing the robot into a cleanroom, you must clean the robot by wiping it off or by removing dust and fine particles from it.
The robot’s packaging is not dust proof. Before bringing the robot into a cleanroom, you must clean the robot by wiping it off or by removing dust and fine particles from it.
*8 A-weighted equivalent level of sound measured according to JIS Z 8737-1 (ISO 11201), while operating at max. Speed with the rated load.
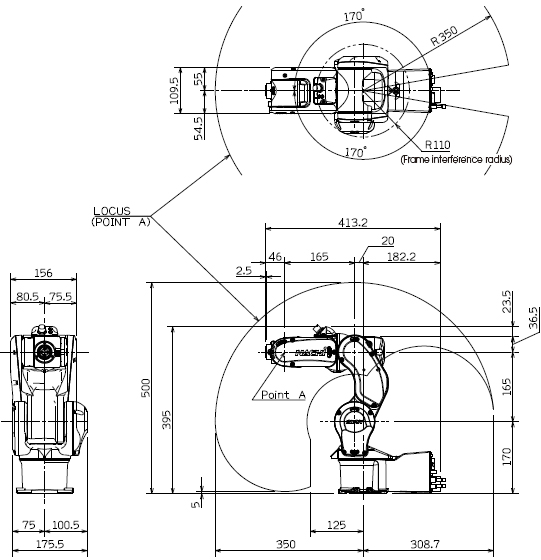
Robot Dimensions and Working Envelope
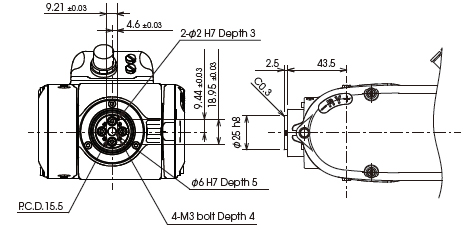
Wrist Dimensions
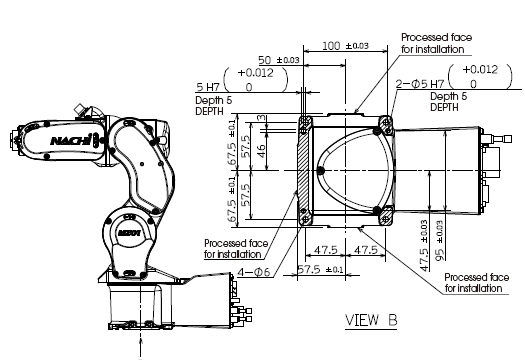
Installation Dimensions